Our Courses
Hands-on programs combining robotics, coding, and AI. In-person across four Ontario locations.
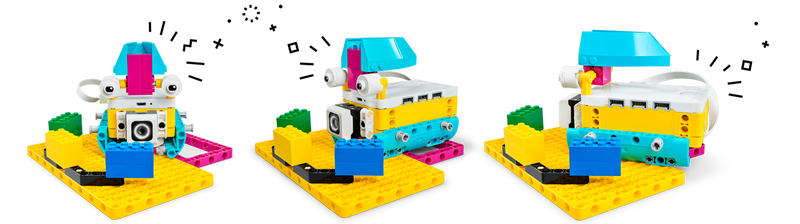
LEGO Robotics
Spike Prime + visual block coding. The perfect first step into robotics.

- Spike Prime Hub hardware and ecosystem
- Intro to block programming for robotics
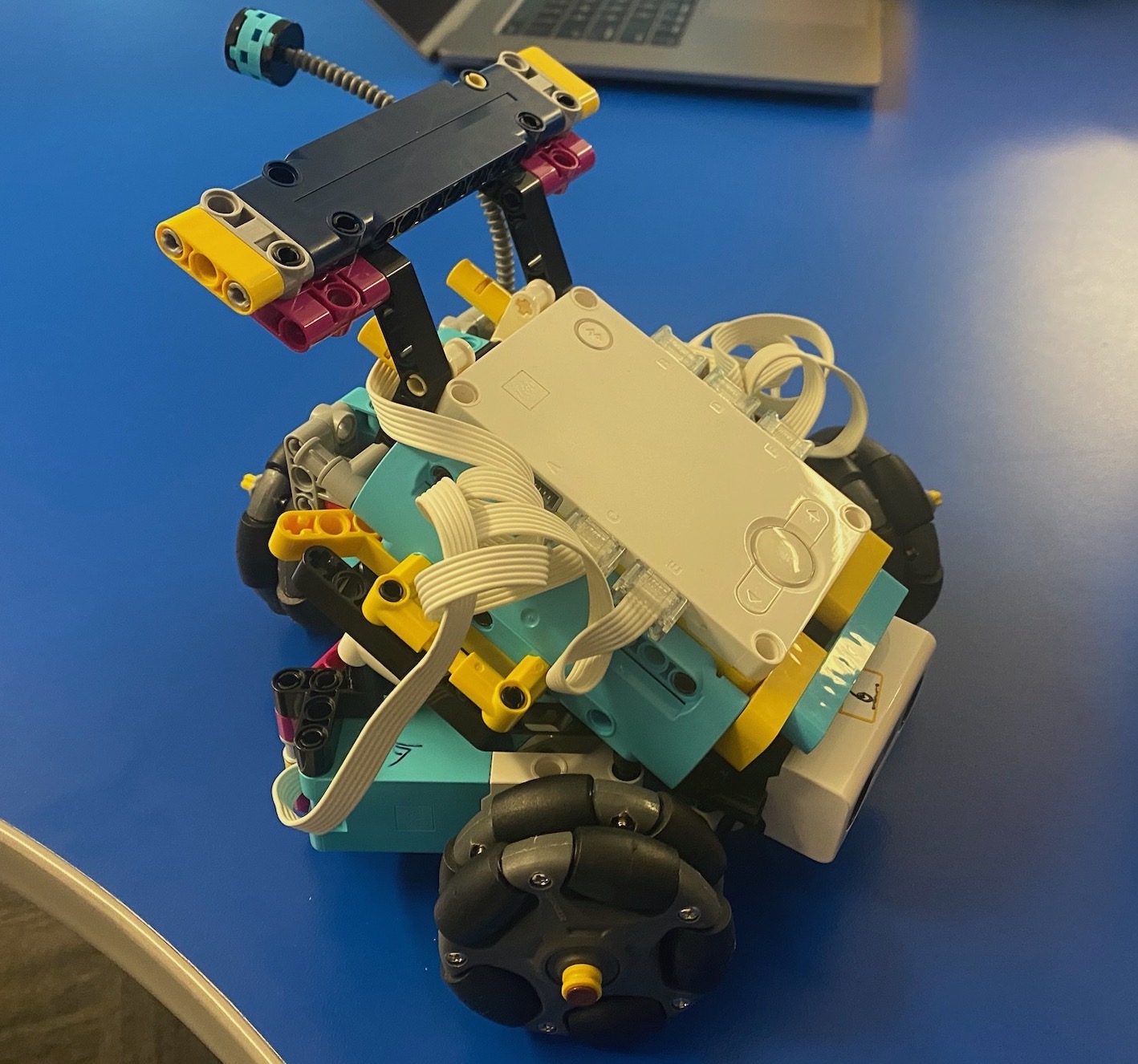
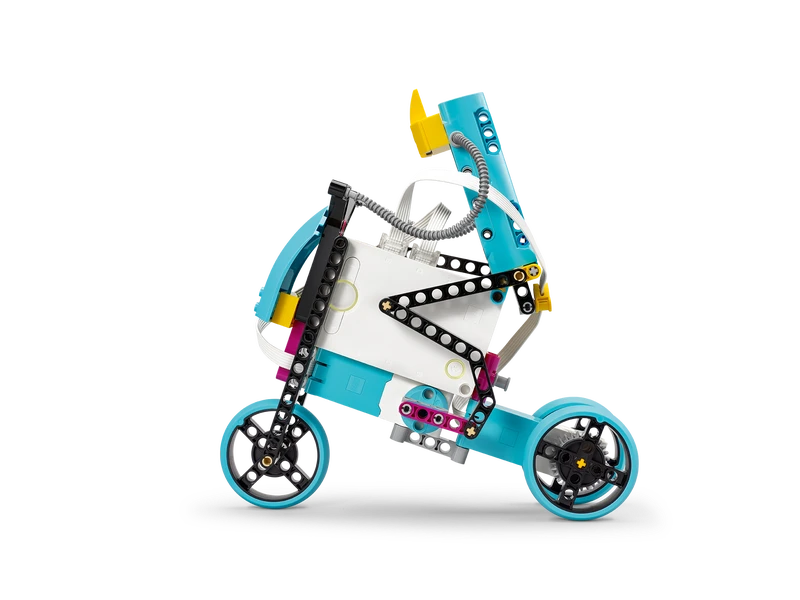
- Building a rover
- Coding motors and synchronizing them
- Using encoders to measure movement
- Control of a simple robotic arm
- Force sensor
- Light sensor for line following
- Ultrasonic sensor for obstacle avoidance
- IMU (Inertial Measurement Unit)
- Autonomous navigation on an FLL challenge mat
- Repeating robot behavior
- Feedback loops for advanced autonomy
- Searching for objects on a map
- Intro to decision making
- Looped decisions
- Nested decisions
- Limitations of discrete decisions
- Feedback & PID algorithms
- Continuous line following
- Continuous obstacle avoidance
- Autonomous navigation — open-ended problem
LEGO Robotics with Python · Level 1
Move from blocks to real Python. Students program Spike Prime robots with proper code — covering motor control, sensor integration, loops, decisions, and an introduction to PID feedback control.



- Spike Prime Hub ecosystem
- Intro to Python for robotics
- Building a rover
- Programming motors
- Encoders for precise movement
- Simple robotic arm control
- Force sensor
- Light sensor (line following)
- Ultrasonic sensor (obstacle avoidance)
- IMU
- Autonomous navigation on FLL mat
- Continuous behaviors
- Feedback loops
- Search on a map
- Decision making basics
- Looped & nested decisions
- Feedback & PID algorithms
- Continuous line following
- Pose estimation & correction
- Open-ended autonomous navigation
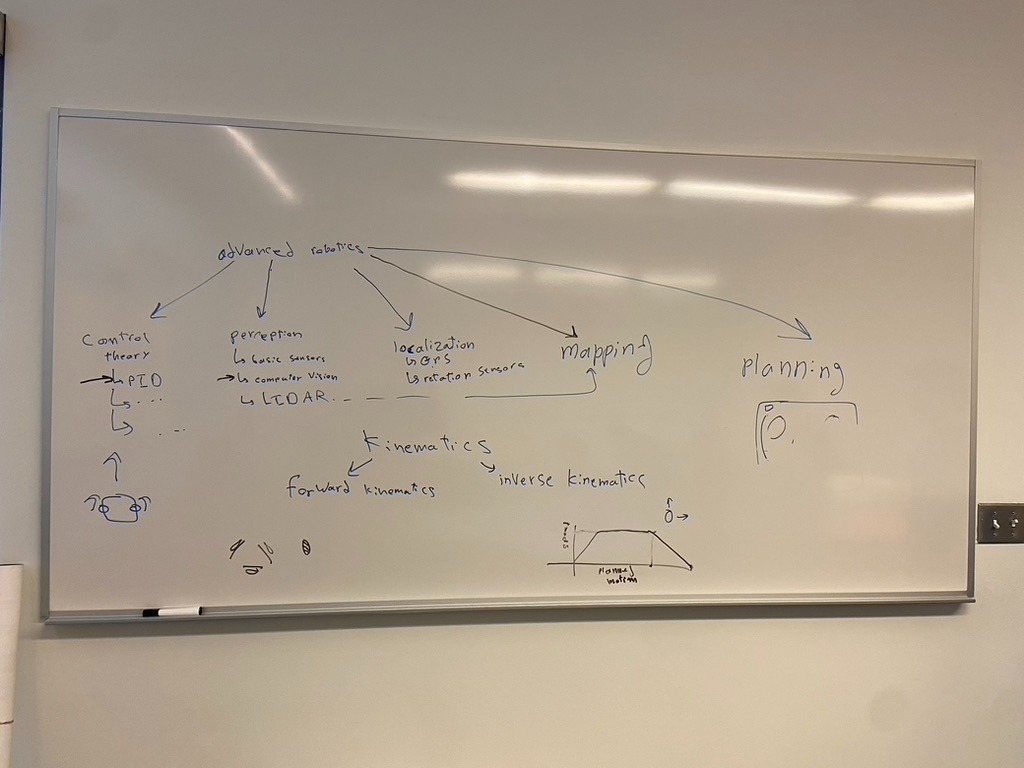
LEGO Robotics with Python · Level 2
Advanced course requiring mastery of Python and some linear algebra. Concepts typically reserved for university — adapted for younger learners through prior teaching experience with middle and high-school students.
- Motor control review
- Sensor review
- Boolean logic, loops, decisions
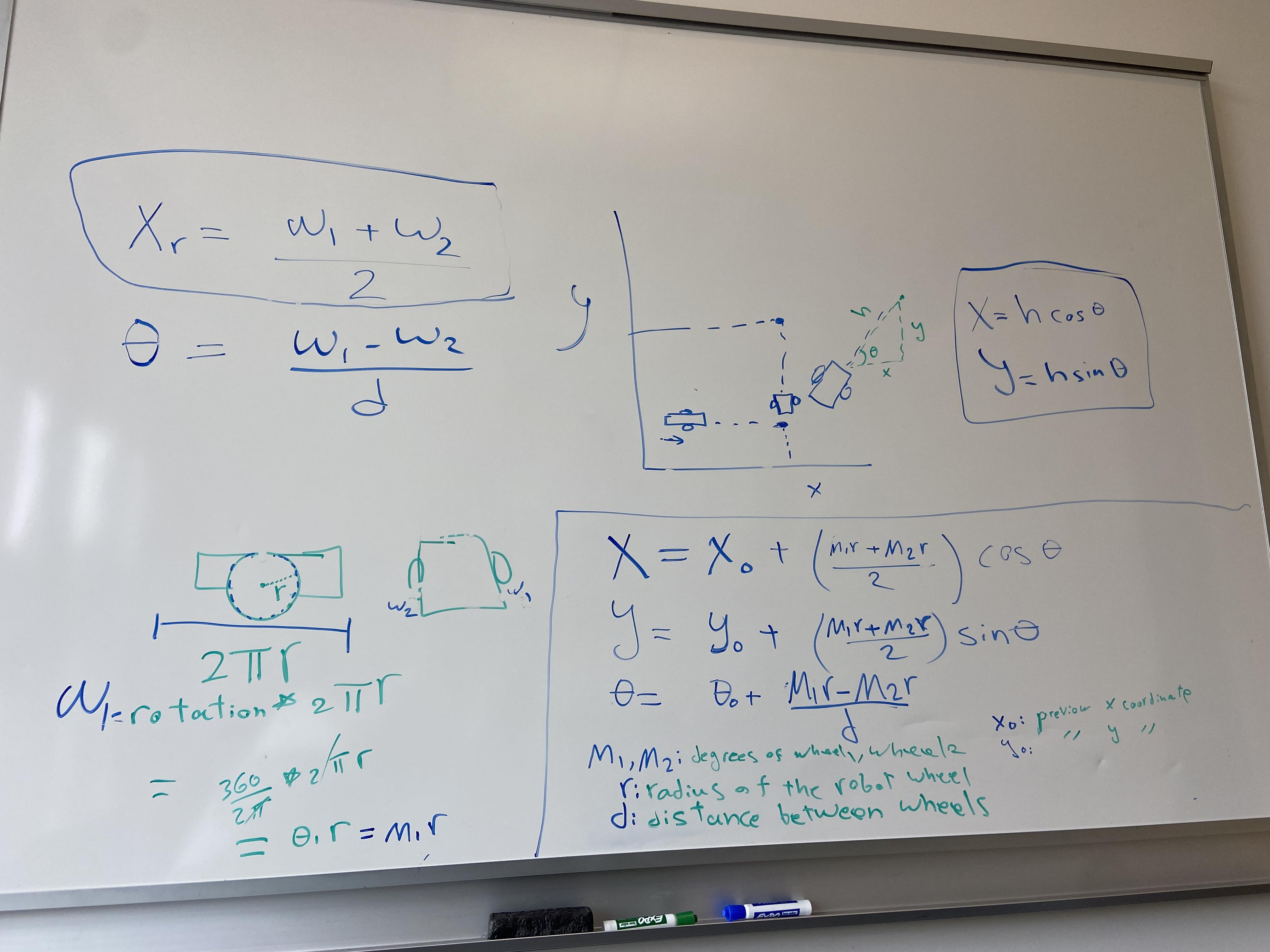
- Pose estimation
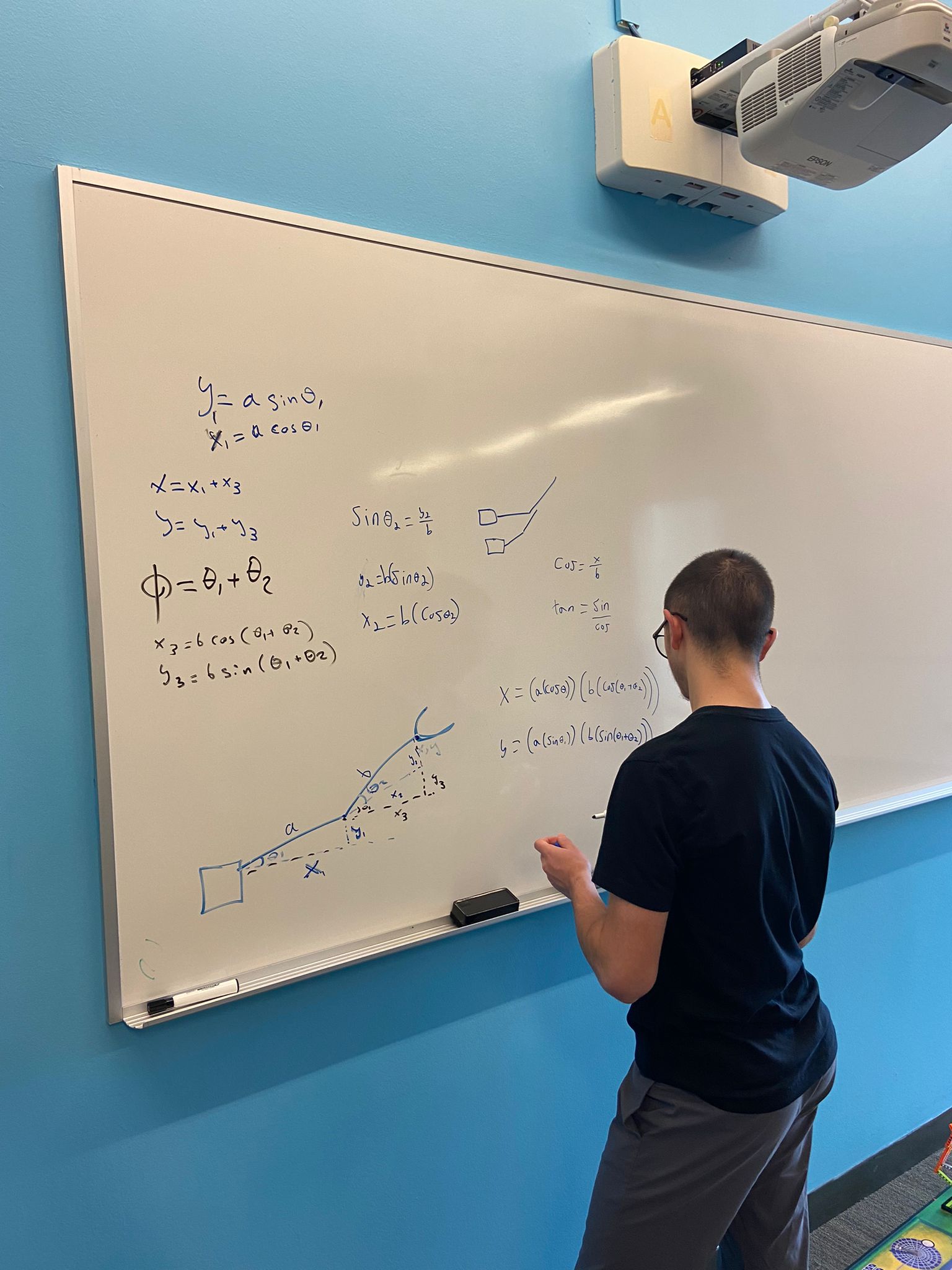
- Forward kinematics (differential drive)
- Inverse kinematics (differential drive)
- Precision motion without IMU
- Trajectory generation
- Motion planning
- Sensor fusion
- Other robotic drivetrains
- Feedback & proportional algorithms
- Time-based feedback control
- PD controllers
- High-speed line following with PD
- Tuning controllers
- Build a 2-DoF robotic arm
- Forward & inverse kinematics
- Program a brick sorter
AI Fundamentals
Demystify modern AI. Students build small models, train computer-vision classifiers, and integrate them into robots — combining Python skills with applied machine learning.
- Intro to machine learning vs. classical programming
- Datasets, features, and labels
- Training vs. inference
- Images as numbers
- Edge detection & filters
- Object recognition with pre-trained models
- Perceptrons
- Activations & weights
- Training a small classifier
- Camera input to robot control
- Object-following robot
- Classification-driven decisions
- How LLMs work (at a kid-friendly level)
- Prompts & responses
- Limitations and bias
- Design an AI-powered robot or app
- Present to the cohort
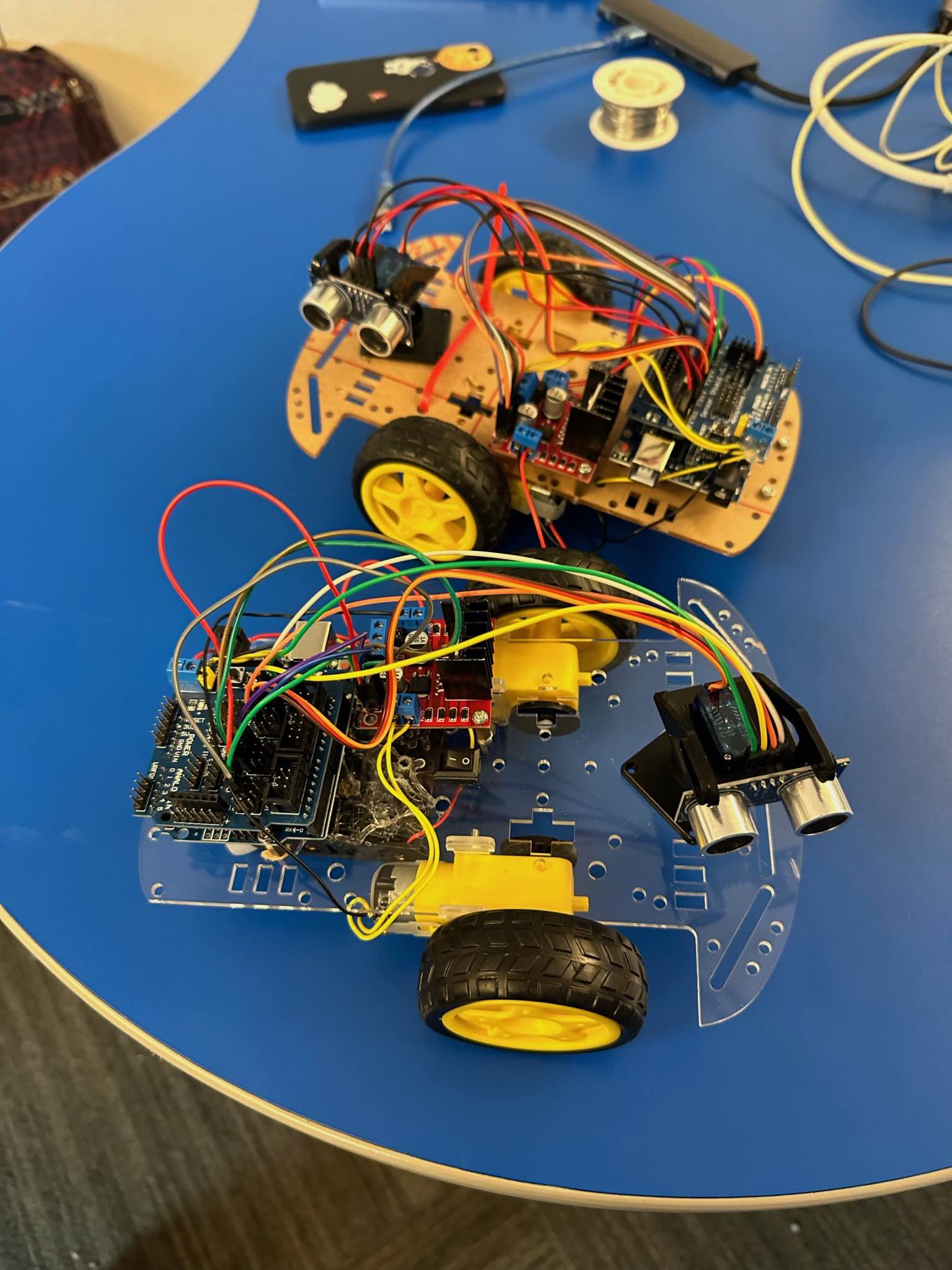
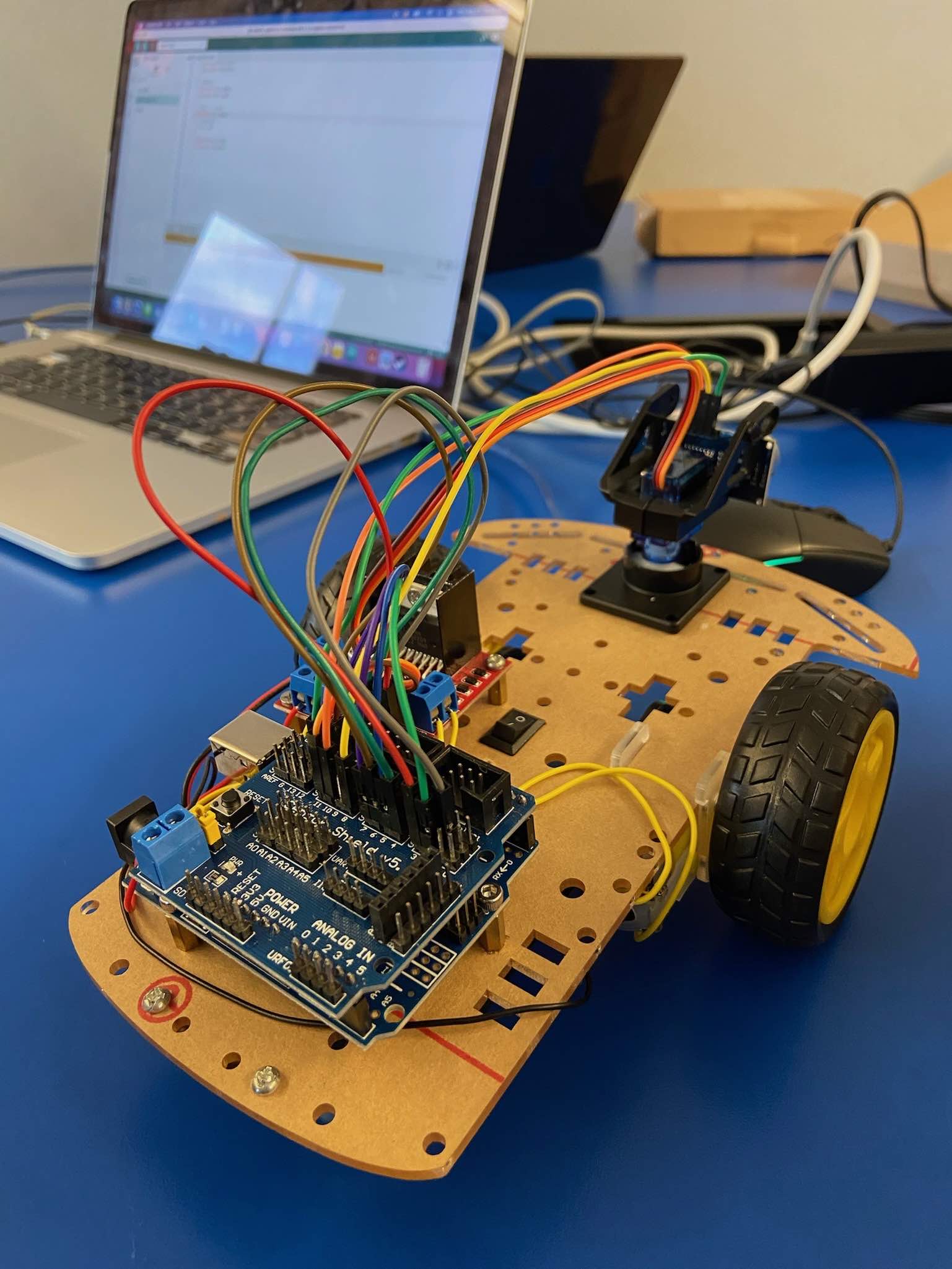
Electronics & Arduino
Comprehensive 8-week course for beginners. In-depth exploration of electronics, programming, motor control, sensors, and basic circuit design using Arduino.
- Voltage, current, resistance
- Virtual circuit design with Tinkercad
- How microcontrollers work
- Arduino IDE setup
- First Arduino programs
- L298N motor driver
- PWM (Pulse-Width Modulation)
- Control motor speed & direction
- Sensor Shield overview
- Connecting sensors to Arduino
- Ultrasonic & infrared sensors
- Interactive sensor-driven projects
- Code Arduino-controlled car
- Forward, reverse, turning
- Combine motors & sensors
- Showcase final projects
- Common troubleshooting techniques
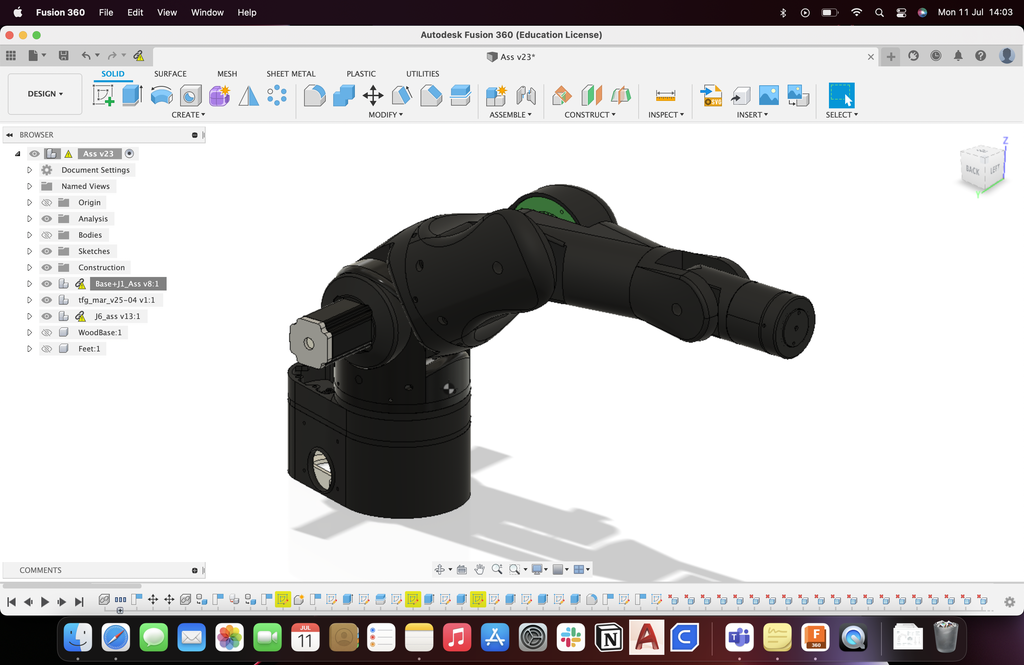
CAD & Design
Students learn to create and model parts using professional industry tools, working through structured challenges that build healthy design practices.
- Navigating Fusion 360 workspace
- Sketching, assembly, CAD drawing
- Basic sketches
- Sketch relationships
- Extrude & extrude cut
- Revolved features
- Materials, colours, writing
- Different sketch tools
- Ellipses and conics
- Patterning sketches
- Trim & extend
- Offset geometry
- Mirror tools
- Fillets & chamfers
- Fillets on parts
- Chamfering edges & draft
- Linear & circular patterns
- Shell command
- Adding parts to assembly
- Interacting with parts
- Mating parts
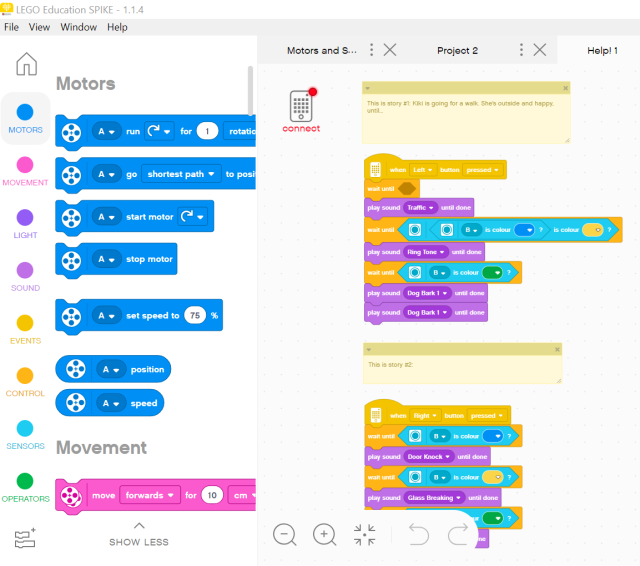
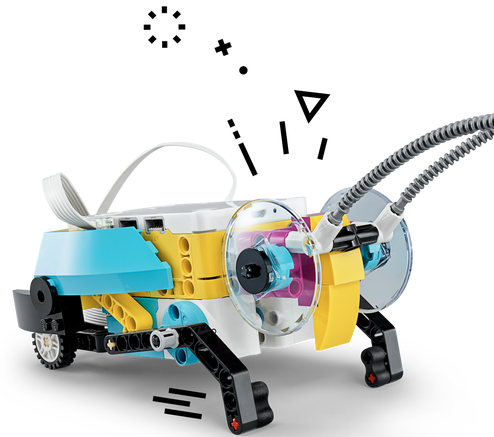
Mechatronics · Level 1
Introduction to mechatronics. Students build storytelling robots, learn about color sensors, motors, and assemble a series of progressively complex builds — culminating in a prosthetic arm prototype.
- Spike Prime Hub hardware
- Block programming for robotics
- Advertisement challenge
- Build basic robot
- Color sensors
- Wait-until block
- Learn about motors
- Build a simple robot
- Reinvent the wheel
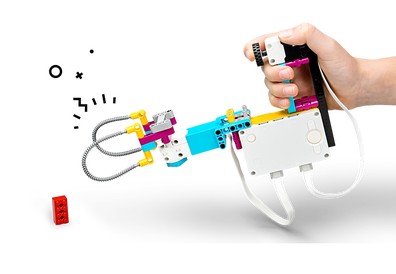
- Design arm
- Assemble arm
- Robot with 5 sensors & 2 motors
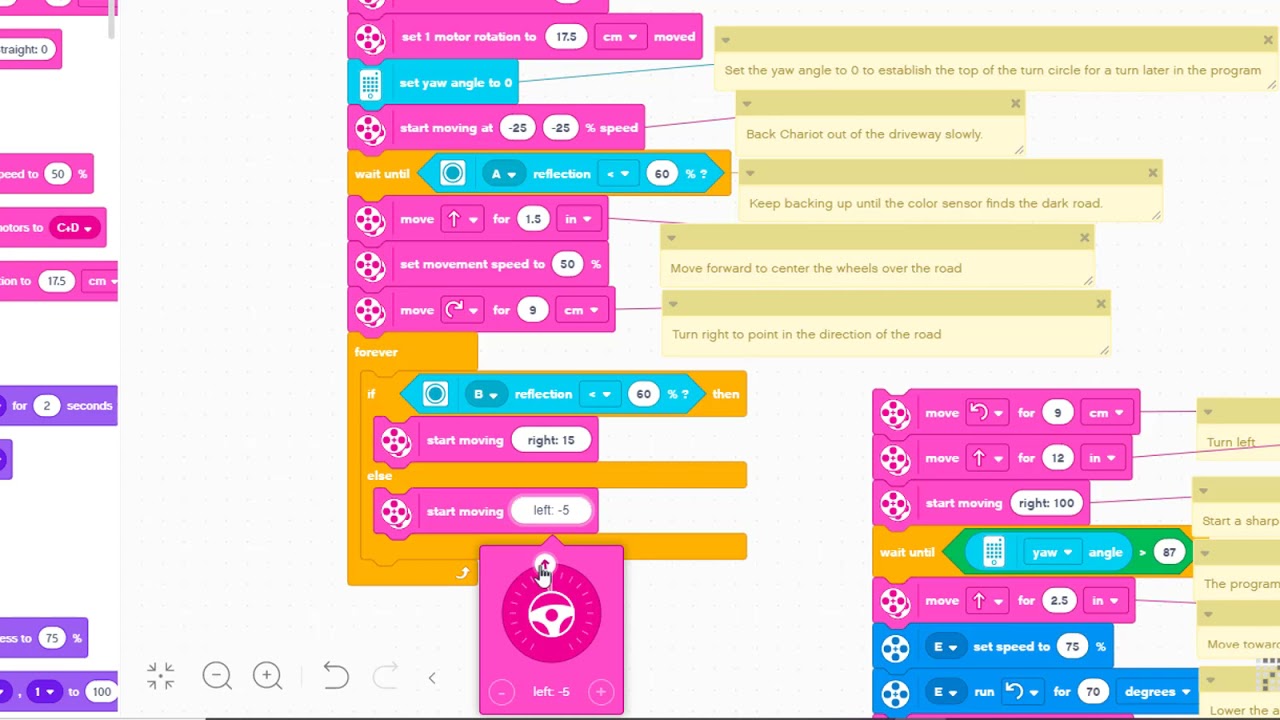
- Program to move around
- Competition mat challenges
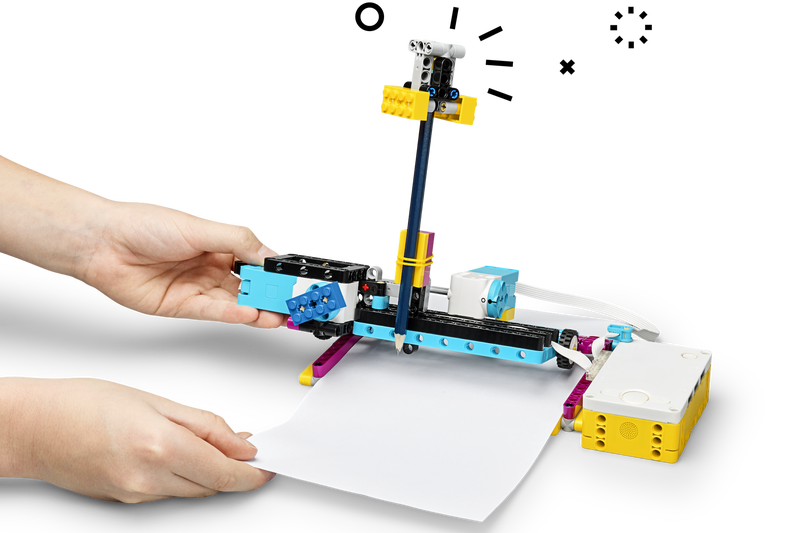
- Robot draws with a pencil
- Debug drawing issues
- Code creative drawings
- Apply knowledge to build prosthetic for those with physical disabilities
Mechatronics · Level 2
Building on Mechatronics Level 1. Students tackle complex mechanisms, multi-system integration, and real-world engineering problems — finishing with a capstone project that integrates drivetrain, sensors, and manipulators.

- Review of Level 1
- Complex mechanical systems
- Gear ratios & torque
- Multi-jointed robotic arm
- Precise motor control
- Coordinated multi-motor sequences
- Omnidirectional drive systems
- Advanced steering mechanisms
- Multiple movement modes
- Combining sensors for navigation
- Sensor fusion techniques
- Autonomous decision-making systems
- Walking robots
- Lifting & manipulation
- Counterbalance & stability
- Build complex robot for real-world challenge
- Integrate drivetrain, sensors, manipulators
- Present & demo final project
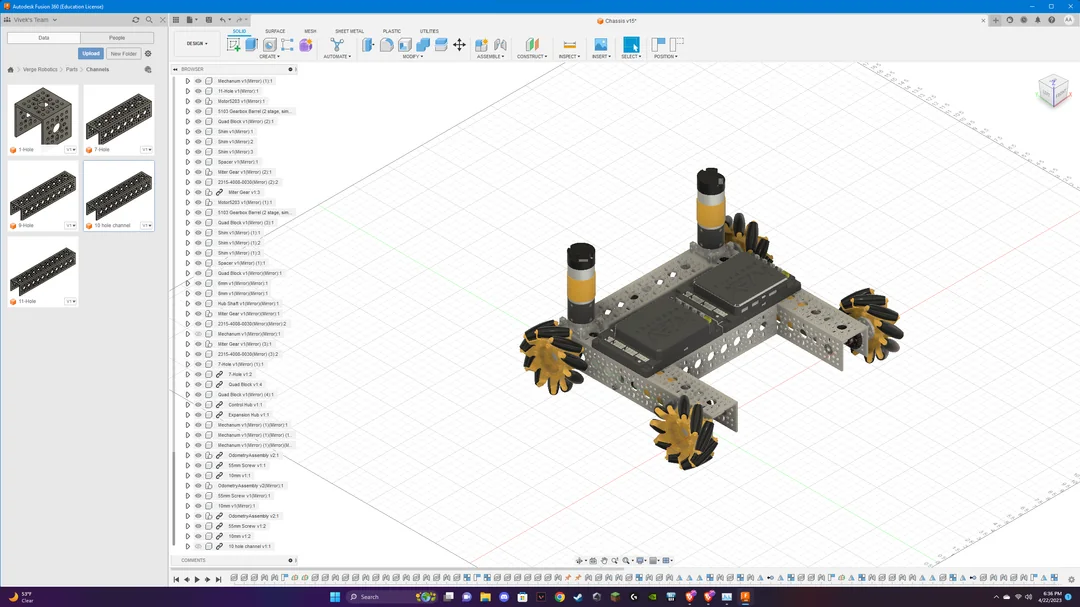
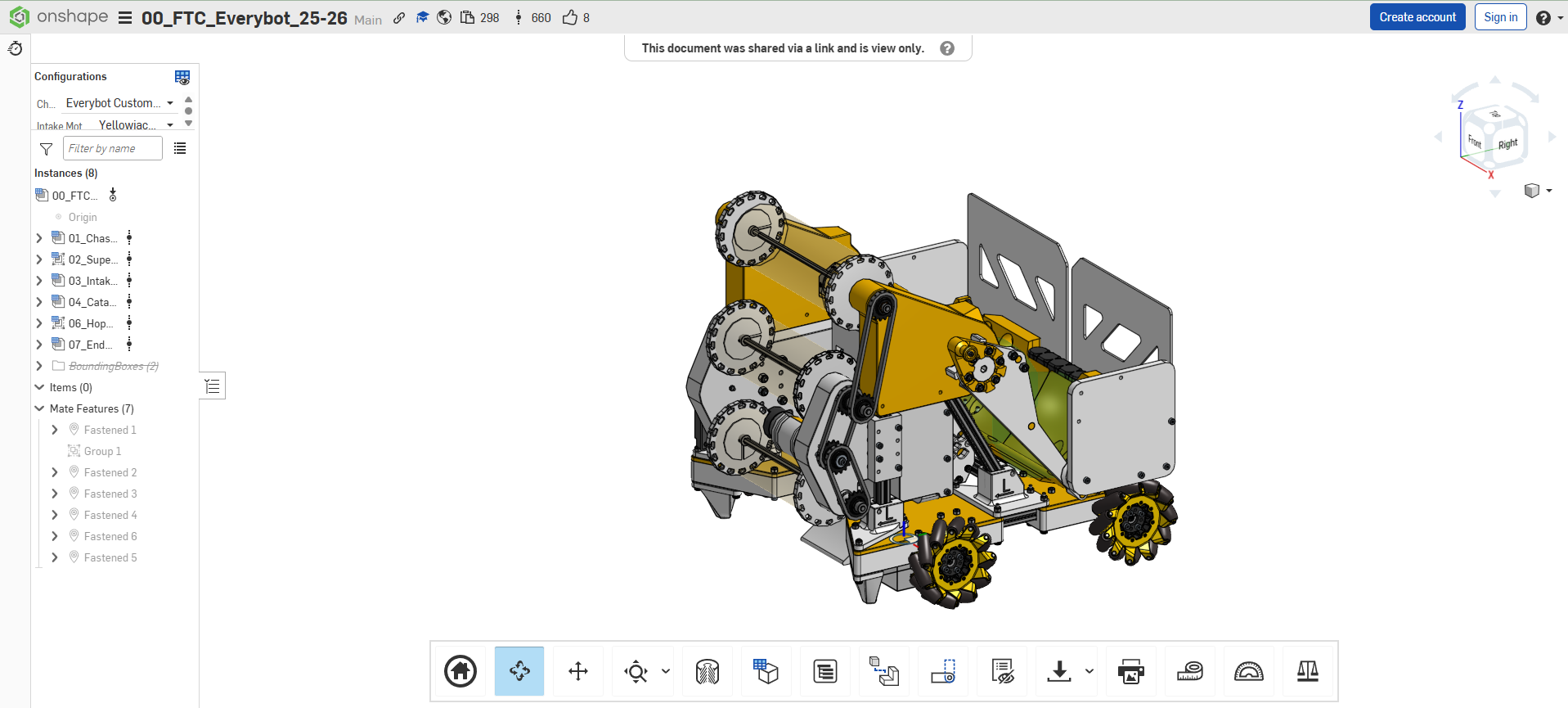
FLL & FTC Teams
For students ready for the next step. Our FLL (ages 9–14) and FTC (ages 12–18) teams compete in regional, provincial, and international robotics tournaments. See our awards page for the track record.
- Game reveal, strategy talk
- Goal setting for the season
- Prototype mechanisms
- Refine robot designs
- CAD & rapid iteration
- Autonomous routines
- Sensor-driven controls
- Tele-op refinement
- Weekly practice matches
- Improve performance under pressure
- Judge presentations
- Alliance selection
- Compete & celebrate
Interactive Learning Labs
Browser-based labs you can launch anytime — no install required.
Ready to enroll?
Register for our summer programs or get in touch with questions.